Computer Science PhD Candidate - Autonomous Multirotor Drone Landing
First Try
First Try Autonomous Landing: DJI Phantom 3 Pro + April Tag 48h12 from Joshua Springer on Vimeo.
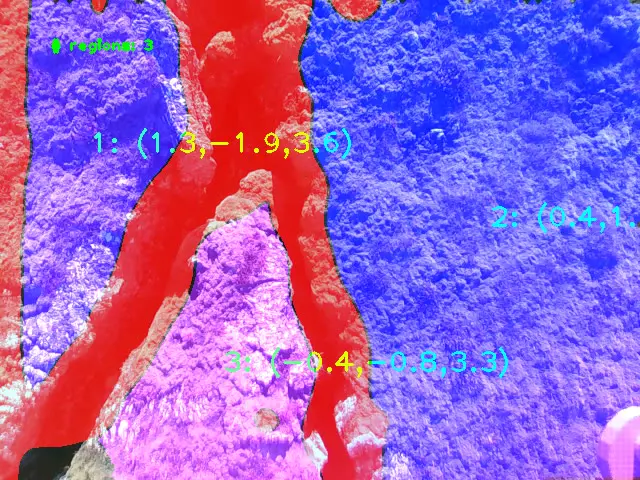
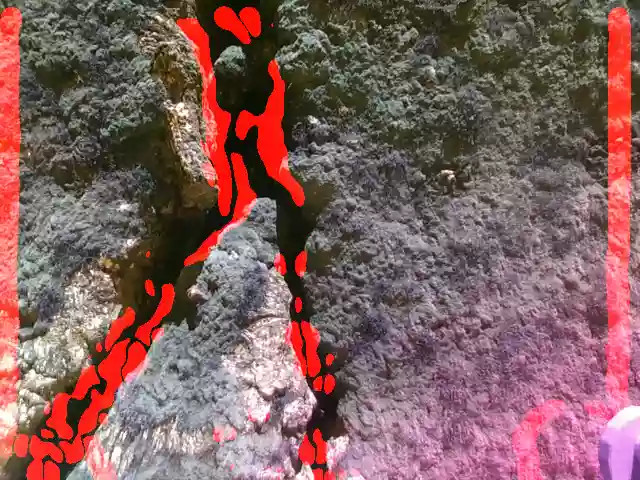
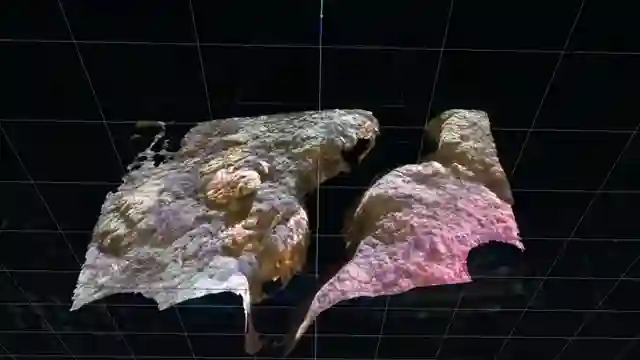
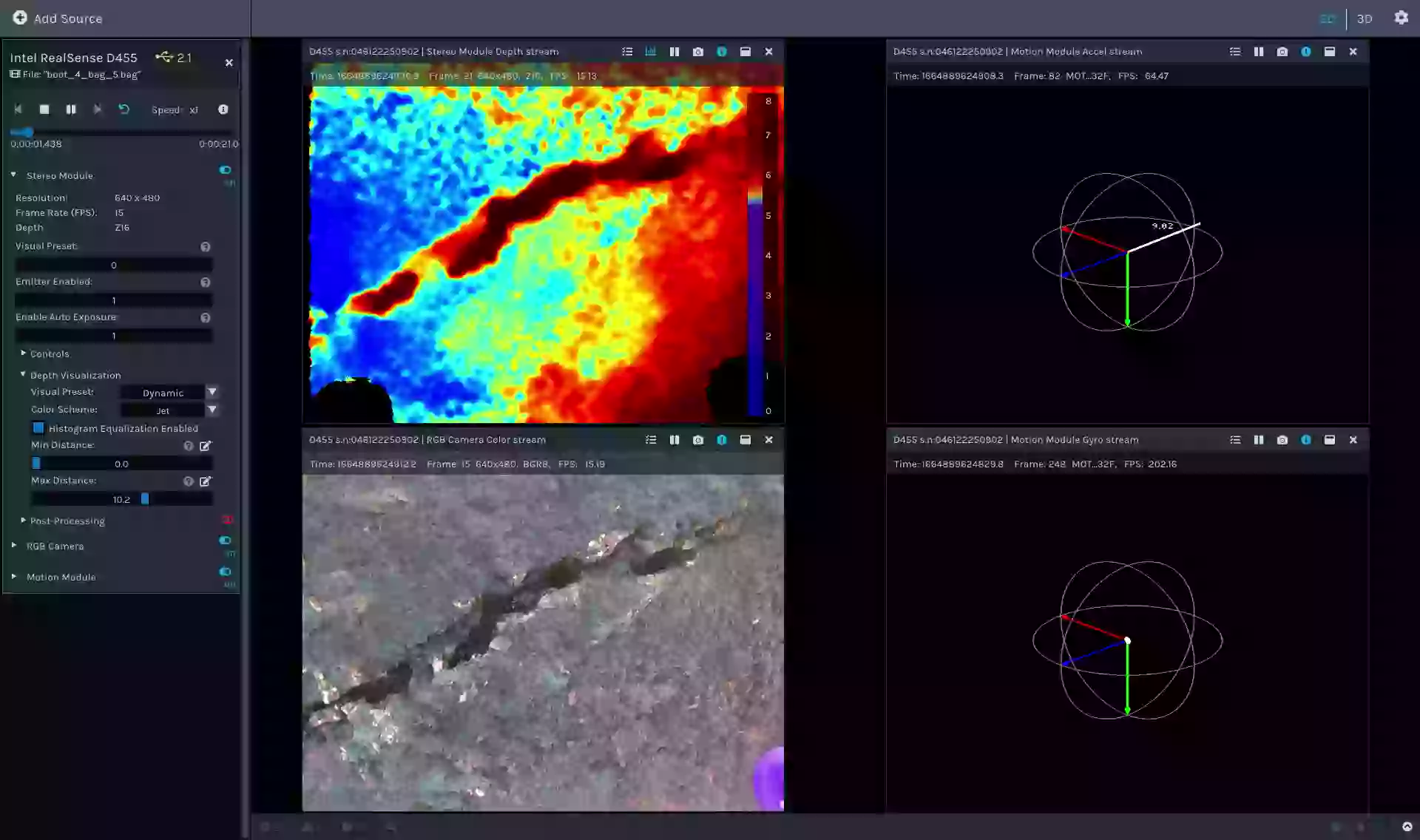
2D View: Here is a comparison of the depth data before and after some pre-processing. The top video is the...
The Depth Drone I have spent a few weeks after the RAVEN fieldwork at Dreki to outfit one of my...
Reykjavik University is a no-fly zone! A quick glance at the map shows why Reykjavik University (shown here in Icelandic...
During the RAVEN fieldwork this summer (2022) there were lots of rumblings around the old crater Fagradalsfjall, which erupted in...
Placeholder for RAVEN fieldwork post.
Indoor Testing In Iceland, it is pretty hard to fly drones outside for about 6 months of the year, when...
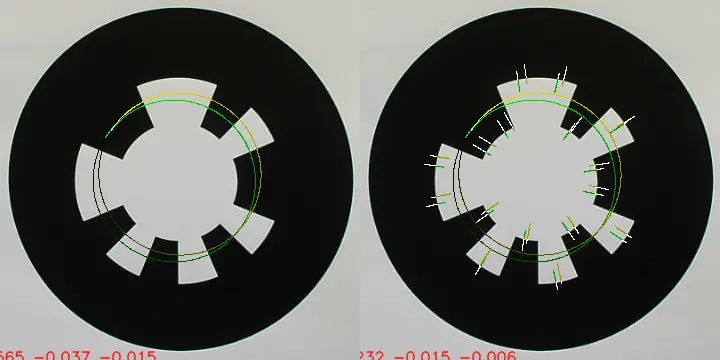
WhyCode is a circular fiducial marker system that is pretty computationally efficient. The original paper describing its structure and detection...
April Tag 48h12 (shown at the top left) is a default April Tag family since April Tag 3, and allows...
As a summer project with Christopher Hamilton, Baldur Björnsson and I assembled a heavy-lift drone with an infrared camera for...
In my master thesis, I developed a method for fiducial precision landing with a gimbal-mounted camera. The algorithm involves identifying...